

2023-07-12
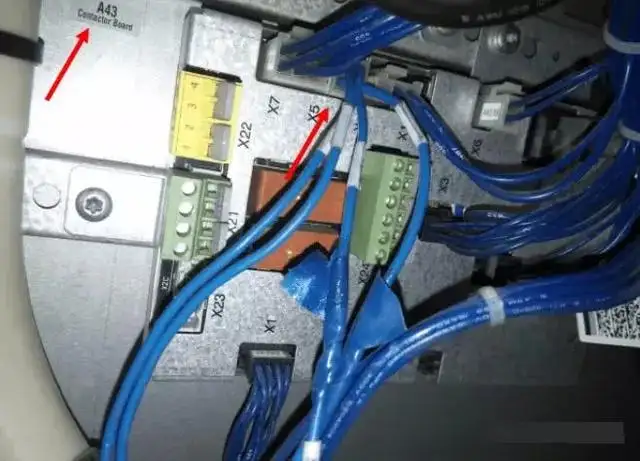
2. ABB রোবট পাওয়ার মডিউল শর্ট সার্কিট বোর্ডের শর্ট সার্কিট ফল্ট পরিচালনা করা
মানবিক কারণ: হট সোয়াপিং হার্ডওয়্যার খুবই বিপজ্জনক, এবং অনেক সার্কিট বোর্ডের ব্যর্থতা হট সোয়াপিংয়ের কারণে ঘটে।শক্তির সাথে কার্ড এবং প্লাগ ঢোকানোর সময় শক্তির অনুপযুক্ত ব্যবহার ইন্টারফেস, চিপস ইত্যাদির ক্ষতি করতে পারে, যার ফলে রোবট সার্কিট বোর্ডের ক্ষতি হতে পারে;রোবট ব্যবহারের সময় যত বাড়বে, রোবট সার্কিট বোর্ডের উপাদানগুলি স্বাভাবিকভাবেই বয়স্ক হবে, যার ফলে রোবট সার্কিট বোর্ড ব্যর্থ হবে।
পরিবেশগত কারণ: অপারেটর দ্বারা অনুপযুক্ত রক্ষণাবেক্ষণের কারণে, রোবট সার্কিট বোর্ড ধুলো দিয়ে আবৃত, যা সংকেত শর্ট সার্কিট হতে পারে।
3. কখন শিল্প রোবট ব্যাকআপ করা প্রয়োজন
নতুন মেশিনের প্রথম পাওয়ারের পর।
কোন পরিবর্তন করার আগে.
3. পরিবর্তনগুলি সম্পন্ন করার পরে।
4. যদি শিল্প রোবটগুলি গুরুত্বপূর্ণ হয় তবে সেগুলি নিয়মিতভাবে সপ্তাহে একবার করা উচিত।
5. ইউএসবি ড্রাইভেও ব্যাকআপ নেওয়া ভাল৷
6. হার্ড ড্রাইভের জায়গা খালি করতে নিয়মিত পুরানো ব্যাকআপ মুছুন।
4. রোবটটি চালু থাকা অবস্থায় এবং টিচিং পেন্ডেন্ট নিম্নলিখিত ইন্টারফেসটি প্রদর্শন করতে থাকে এমন পরিস্থিতি কীভাবে পরিচালনা করবেন
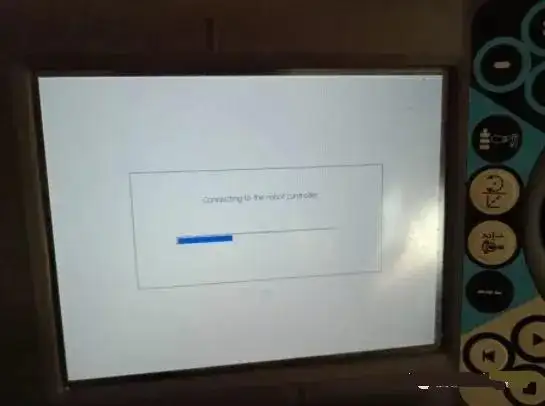 উপরের পরিস্থিতিটি হল যে শিক্ষণীয় দুল এবং রোবটের প্রধান নিয়ামকের মধ্যে কোনও যোগাযোগের সংযোগ স্থাপন করা হয়নি এবং সংযোগ স্থাপন না করার কারণগুলির মধ্যে রয়েছে:
উপরের পরিস্থিতিটি হল যে শিক্ষণীয় দুল এবং রোবটের প্রধান নিয়ামকের মধ্যে কোনও যোগাযোগের সংযোগ স্থাপন করা হয়নি এবং সংযোগ স্থাপন না করার কারণগুলির মধ্যে রয়েছে:
1. রোবট হোস্ট ত্রুটিপূর্ণ.
2. রোবট হোস্টের অন্তর্নির্মিত CF কার্ড (SD কার্ড) ত্রুটিপূর্ণ।
3. শিক্ষণ দুল এবং হোস্টের মধ্যে নেটওয়ার্ক কেবলটি আলগা, ইত্যাদি।
প্রক্রিয়াকরণ পদ্ধতি: 1. হোস্ট স্বাভাবিক কিনা এবং হোস্টের SD কার্ড স্বাভাবিক কিনা তা পরীক্ষা করুন।
2. টিচিং পেন্ডেন্ট থেকে হোস্ট পর্যন্ত নেটওয়ার্ক ক্যাবল সঠিকভাবে সংযুক্ত কিনা তা পরীক্ষা করুন।
5. যখন রোবট একটি অ্যালার্ম বার্তা প্রদর্শন করে তখন 10106 রক্ষণাবেক্ষণের সময় অনুস্মারকটির অর্থ কী?
এই পরিস্থিতি একটি ABB রোবট বুদ্ধিমান পর্যায়ক্রমিক রক্ষণাবেক্ষণ অনুস্মারক.
6. যখন রোবট একটি পাওয়ার অন স্টেটে প্রবেশ করে তখন সিস্টেমের ত্রুটি কীভাবে পরিচালনা করবেন?
1. রোবট একবার রিস্টার্ট করুন।
যদি না হয়, আরও বিস্তারিত অ্যালার্ম প্রম্পটের জন্য শিক্ষার দুল পরীক্ষা করুন এবং পদক্ষেপ নিন।
3. রিস্টার্ট করুন।
4. যদি এটি এখনও প্রকাশ না করা যায় তবে B স্টার্টআপ চেষ্টা করুন।
5. যদি এটি এখনও কাজ না করে, অনুগ্রহ করে P স্টার্টআপ চেষ্টা করুন।
6. যদি এটি এখনও কাজ না করে, অনুগ্রহ করে আমি স্টার্টআপ করার চেষ্টা করুন (এটি রোবটটিকে তার কারখানার সেটিংসে ফিরিয়ে দেবে, সতর্ক থাকুন)।
7. রোবট ব্যাকআপ একাধিক রোবট দ্বারা ভাগ করা যেতে পারে?
না। উদাহরণস্বরূপ, রোবট A এর ব্যাকআপ শুধুমাত্র রোবট A এর জন্য ব্যবহার করা যেতে পারে, রোবট B বা C এর জন্য নয়, কারণ এটি সিস্টেমের ব্যর্থতার কারণ হতে পারে।
8. রোবট ব্যাকআপে কোন ফাইল শেয়ার করা যায়?
যদি দুটি রোবট একই মডেল এবং কনফিগারেশনের হয়।আপনি RAPID প্রোগ্রাম এবং EIO ফাইল শেয়ার করতে পারেন, কিন্তু শেয়ার করার পরে, এটিকে স্বাভাবিকভাবে ব্যবহার করার আগে যাচাই করাও দরকার।
9. রোবটের যান্ত্রিক উৎপত্তি কি?যান্ত্রিক উৎপত্তি কোথায়?
রোবটের ছয়টি সার্ভো মোটরের প্রতিটির একটি অনন্য স্থির যান্ত্রিক উত্স রয়েছে।রোবটের যান্ত্রিক উৎপত্তির ভুল সেটিং রোবটের সীমিত বা ভুল নড়াচড়া, সরলরেখায় হাঁটতে না পারা এবং রোবটের মারাত্মক ক্ষতির মতো সমস্যার সৃষ্টি করবে।
10. রোবট 50204 এর অ্যাকশন মনিটরিং অ্যালার্ম কীভাবে সাফ করবেন?
1. বাস্তব পরিস্থিতির সাথে মেলে রোবট অ্যাকশন মনিটরিং প্যারামিটারগুলি (কন্ট্রোল প্যানেল অ্যাকশন মনিটরিং মেনুতে) পরিবর্তন করুন।
2. রোবটের ত্বরণ কমাতে AccSet কমান্ড ব্যবহার করুন।
3. গতি ডেটাতে v হ্রাস করুন_ রট বিকল্প।
11. রোবটটি প্রথমবার চালু হলে অ্যালার্ম "50296, SMB মেমরি ডেটা পার্থক্য" কীভাবে পরিচালনা করবেন?
1. ABB প্রধান মেনু থেকে ক্রমাঙ্কন নির্বাচন করুন।
2. ROB_ এ ক্লিক করুন 1. ক্রমাঙ্কন স্ক্রীনে প্রবেশ করুন এবং SMB মেমরি নির্বাচন করুন।
3. "উন্নত" নির্বাচন করুন, প্রবেশ করুন এবং "ক্লিয়ার কন্ট্রোল ক্যাবিনেট মেমরি" ক্লিক করুন।
4. সম্পূর্ণ করার পরে, "বন্ধ" ক্লিক করুন এবং তারপর "আপডেট" এ ক্লিক করুন।
5. 'অদলবদল কন্ট্রোল ক্যাবিনেট বা রোবোটিক আর্ম, SMB মেমরি ডেটা সহ কন্ট্রোল ক্যাবিনেট আপডেট করা' নির্বাচন করুন৷
12. RAPID প্রোগ্রামে রোবট ট্র্যাজেক্টরি গতির গতি কীভাবে কাস্টমাইজ করা যায়?
1. টিচিং পেন্ডেন্টের প্রধান মেনু থেকে প্রোগ্রাম ডেটা নির্বাচন করুন।
2. ডেটা টাইপ স্পিডডাটা খোঁজার পর, নতুন ক্লিক করুন।
3. প্রারম্ভিক মানের উপর ক্লিক করুন, এবং চারটি ভেরিয়েবলের স্পীডডাটার অর্থ হল: v_ TCP রোবটের রৈখিক চলমান গতির প্রতিনিধিত্ব করে, v_ Rot রোবটের ঘূর্ণন গতির প্রতিনিধিত্ব করে, v_ Leax বহিরাগত অক্ষের রৈখিক অপারেটিং গতিকে প্রতিনিধিত্ব করে , v_ Reax বহিরাগত অক্ষের ঘূর্ণন গতির প্রতিনিধিত্ব করে।যদি কোন বাহ্যিক অক্ষ না থাকে, শেষ দুটি পরিবর্তন করার প্রয়োজন নেই।
4. কাস্টমাইজড ডেটা RAPID প্রোগ্রামে কল করা যেতে পারে।
13. ABB রোবট সার্ভো মোটর মেরামতে 6টি সাধারণ ত্রুটির সমস্যা সমাধান
1. উচ্চ গতির ঘূর্ণনের সময় মোটর ত্রুটি কাউন্টার ওভারফ্লো ত্রুটি কীভাবে পরিচালনা করবেন?
উচ্চ গতির ঘূর্ণনের সময় মোটর ত্রুটি কাউন্টার ওভারফ্লো ফল্ট ঘটে।
পাল্টা ব্যবস্থা 1: মোটর পাওয়ার তার এবং এনকোডার তারের তারের সঠিক কিনা এবং তারটি ক্ষতিগ্রস্ত হয়েছে কিনা তা পরীক্ষা করুন।
লং কমান্ড পালস ইনপুট করার সময় মোটর ত্রুটি কাউন্টার ওভারফ্লো ফল্ট ঘটে।
মোটর ত্রুটি কাউন্টার ওভারফ্লো ফল্ট অপারেশন সময় ঘটেছে.
কাউন্টারমেজার 2: এরর কাউন্টারের ওভারফ্লো লেভেল সেটিং মান বাড়ান;ঘূর্ণন গতি কমিয়ে দিন;ত্বরণ এবং হ্রাসের সময় প্রসারিত করুন;লোডটি খুব ভারী, এবং স্ক্র্যাচ থেকে একটি বৃহত্তর ক্ষমতার মোটর নির্বাচন করা বা লোড হ্রাস করা এবং লোড বাড়ানোর জন্য ট্রান্সমিশন সংস্থাগুলি যেমন হ্রাসকারী ইনস্টল করা প্রয়োজন।
2. পালস আউটপুট থাকলে এটি কাজ না করলে কী করা উচিত?
কন্ট্রোলারের পালস আউটপুটের বর্তমান মান এবং পালস আউটপুট আলো জ্বলছে কিনা তা তত্ত্বাবধান করুন, স্বীকার করুন যে কমান্ড পালসটি পূরণ হয়েছে এবং এখন স্বাভাবিকভাবে আউটপুট হচ্ছে;
কন্ট্রোলার থেকে ড্রাইভার পর্যন্ত কন্ট্রোল ক্যাবল, পাওয়ার ক্যাবল এবং এনকোডার ক্যাবল ভুলভাবে সংযুক্ত, ক্ষতিগ্রস্ত বা দুর্বল যোগাযোগে আছে কিনা তা পরীক্ষা করুন;
ব্রেক সহ সার্ভো মোটরের ব্রেক এখন খোলা হয়েছে কিনা তা পরীক্ষা করুন;
সার্ভো ড্রাইভারের প্যানেল পালস কমান্ডের ইনপুট স্বীকার করে কিনা তা তদারকি করুন;
রান অপারেশন কমান্ড স্বাভাবিক;
নিয়ন্ত্রণ ফর্ম অবশ্যই দিকনির্দেশক নিয়ন্ত্রণ ফর্ম চয়ন করতে হবে;
সার্ভো ড্রাইভার দ্বারা সেট করা ইনপুট পালস টাইপ কি কমান্ড পালসের সেটিং এর সাথে সামঞ্জস্যপূর্ণ;
নিশ্চিত করুন যে ইতিবাচক ঘূর্ণন সাইড ড্রাইভ বন্ধ করা হয়েছে, ঘূর্ণন সাইড ড্রাইভ স্টপ সংকেত, এবং ত্রুটি কাউন্টার রিসেট সংকেত ইনপুট করা হয়নি, লোড সংযোগ বিচ্ছিন্ন করা হয়েছে, এবং নো-লোড অপারেশন স্বাভাবিক।যান্ত্রিক সিস্টেম পরীক্ষা করুন।
3. লোড সহ কোন ওভারলোড রিপোর্ট না থাকলে আমার কী করা উচিত?
যদি এটি ঘটে যখন সার্ভো রান সংকেত সংযুক্ত থাকে এবং কোন পালস নির্গত হয় না:
কোন দুর্বল যোগাযোগ বা তারের ক্ষতি আছে কিনা তা দেখতে সার্ভো মোটরের পাওয়ার তারের তারের পরীক্ষা করুন;যদি এটি একটি ব্রেক সহ একটি সার্ভো মোটর হয়, তবে ব্রেকটি চালু করতে হবে;স্পিড লুপের লাভ কি খুব বেশি সেট করা হয়েছে;স্পিড লুপ সেটের অবিচ্ছেদ্য সময় ধ্রুবক কি খুব ছোট।
অপারেশন চলাকালীন সার্ভো শুধুমাত্র ত্রুটিপূর্ণ হলে:
আজিমুথ সার্কিটের লাভ কি খুব বেশি সেট;পজিশনিং সমাপ্তির প্রশস্ততা কি খুব ছোট সেট;সার্ভো মোটর শ্যাফ্টে কোনও লক করা রটার নেই কিনা তা পরীক্ষা করুন এবং স্ক্র্যাচ থেকে যন্ত্রপাতি সামঞ্জস্য করুন।
4. অপারেশন চলাকালীন অস্বাভাবিক শব্দ বা কম্পন কিভাবে মোকাবেলা করবেন?
সার্ভো ওয়্যারিং:
ক্ষয়ক্ষতি পরীক্ষা করতে মানসম্মত পাওয়ার তার, এনকোডার তার, নিয়ন্ত্রণ তার এবং তার ব্যবহার করুন;কন্ট্রোল লাইনের কাছাকাছি হস্তক্ষেপের উত্স আছে কিনা তা পরীক্ষা করুন এবং তারা কাছাকাছি উচ্চ কারেন্ট পাওয়ার তারের সমান্তরাল বা খুব কাছাকাছি কিনা;চমত্কার গ্রাউন্ডিং নিশ্চিত করতে গ্রাউন্ডিং টার্মিনালের সম্ভাব্যতার কোন পরিবর্তন আছে কিনা তা পরীক্ষা করুন।
সার্ভো পরামিতি:
servo গেইন সেটিং খুব বড়, এবং এটি স্ক্র্যাচ থেকে ম্যানুয়ালি বা সক্রিয়ভাবে servo পরামিতি সামঞ্জস্য করার সুপারিশ করা হয়;স্পিড রেসপন্স ফিল্টারের টাইম কনস্ট্যান্টের সেটিং স্বীকার করে, 0 এর প্রারম্ভিক মান সহ, পরীক্ষার মাধ্যমে সেট মান বৃদ্ধি করা সম্ভব;ইলেকট্রনিক গিয়ার রেশিও সেটিং অনেক বড়, ফ্যাক্টরি সেটিংসে পুনরুদ্ধার করার পরামর্শ দিচ্ছে;সার্ভো সিস্টেম এবং যান্ত্রিক সিস্টেমের মধ্যে অনুরণন, খাঁজ ফিল্টার ফ্রিকোয়েন্সি এবং প্রশস্ততা পরীক্ষা এবং সামঞ্জস্য করা।
যান্ত্রিক সিস্টেম:
মোটর শ্যাফ্ট এবং সরঞ্জাম সিস্টেমের সাথে সংযোগকারী কাপলিং বিচ্যুত হয়েছে এবং ইনস্টলেশন স্ক্রুগুলি শক্ত করা হয়নি;পুলি বা গিয়ারের দুর্বল ব্যস্ততাও লোড টর্কের পরিবর্তন ঘটাতে পারে।নো-লোড অপারেশন পরীক্ষা করুন।নো-লোড অপারেশন স্বাভাবিক হলে, যান্ত্রিক সিস্টেমের বন্ধন অংশে কোন অস্বাভাবিকতা আছে কিনা তা পরীক্ষা করুন;লোডের জড়তা, ঘূর্ণন সঁচারক বল এবং গতি খুব বড় কিনা তা স্বীকার করুন, নো-লোড অপারেশন পরীক্ষা করুন এবং যদি নো-লোড অপারেশন স্বাভাবিক হয়, তাহলে লোড কমিয়ে দিন বা বড় ক্ষমতার সাথে ড্রাইভার এবং মোটর প্রতিস্থাপন করুন।
5. ABB রোবট সার্ভো মোটর মেরামতের সময় ভুল অভিযোজন নিয়ন্ত্রণ এবং অবস্থান কীভাবে পরিচালনা করবেন?
প্রথমত, কন্ট্রোলারের প্রকৃত ঘোষিত পালস মান প্রত্যাশিত মানের সাথে সামঞ্জস্যপূর্ণ কিনা তা স্বীকার করুন এবং যদি না হয় তবে প্রোগ্রামটি পরীক্ষা করে সংশোধন করুন;
সার্ভো ড্রাইভার দ্বারা প্রাপ্ত পালস কমান্ডের সংখ্যা কন্ট্রোলার দ্বারা ঘোষিত একটির সাথে মেলে কিনা তা তদারকি করুন।যদি না হয়, নিয়ন্ত্রণ তারের চেক করুন;সার্ভো কমান্ড পালস ফর্মের সেটিং কন্ট্রোলার সেটিং, যেমন CW/CCW বা পালস + দিকনির্দেশের সাথে সামঞ্জস্যপূর্ণ কিনা তা পরীক্ষা করুন;
সার্ভো লাভ সেটিংটি খুব বড়, দয়া করে ম্যানুয়ালি বা সক্রিয়ভাবে স্ক্র্যাচ থেকে সার্ভো লাভ সামঞ্জস্য করুন;সার্ভো মোটর পারস্পরিক গতির সময় সঞ্চিত ত্রুটির প্রবণ।প্রক্রিয়া দ্বারা অনুমোদিত অবস্থার অধীনে একটি যান্ত্রিক উত্স সংকেত সেট করার সুপারিশ করা হয়, এবং ত্রুটিটি অনুমোদিত স্কেল অতিক্রম করার আগে উত্স অনুসন্ধান অপারেশন সম্পাদন করে;যান্ত্রিক সিস্টেমের নিজেই কম নির্ভুলতা বা অস্বাভাবিক সংক্রমণ সংস্থা রয়েছে (যেমন সার্ভো মোটর এবং সরঞ্জাম সিস্টেমের মধ্যে সংযোগের বিচ্যুতি)।
6. ABB রোবট সার্ভো মোটর মেরামত, নির্দেশমূলক নিয়ন্ত্রণ অপারেশন, ওভারস্পিড ফল্ট রিপোর্ট করা হয়েছে।এটা কিভাবে হ্যান্ডেল?
সার্ভো রান সিগন্যাল সংযুক্ত হওয়ার সাথে সাথেই এটি ট্রিগার করবে: সার্ভো মোটর পাওয়ার কেবল এবং এনকোডার তারের তারের সঠিক এবং ক্ষতিগ্রস্থ কিনা তা পরীক্ষা করুন।
14. ABB শিল্প রোবটগুলি কীভাবে নিয়মিত রক্ষণাবেক্ষণের মধ্য দিয়ে যায়?
"ব্রেক পরিদর্শন" এর স্বাভাবিক অপারেশনের আগে, প্রতিটি অক্ষের মোটর ব্রেক পরীক্ষা করা প্রয়োজন।মোটর ব্রেক জন্য পরিদর্শন পদ্ধতি নিম্নরূপ:
1. প্রতিটি রোবোটিক বাহুর অক্ষকে তার সর্বোচ্চ লোড অবস্থানে চালান৷
2. রোবট কন্ট্রোলারের মোটর মোড নির্বাচনের সুইচটি মোটর বন্ধ অবস্থানে চালু করুন।
3. শ্যাফ্ট তার আসল অবস্থানে আছে কিনা তা পরীক্ষা করুন।যদি মোটর বন্ধ করার পরেও যান্ত্রিক হাত তার অবস্থান বজায় রাখে, তাহলে এটি নির্দেশ করে যে ব্রেকটি ভালো অবস্থায় আছে।
হ্রাস অপারেশন (250mm/s) ফাংশন হারানোর বিপদ
কম্পিউটার বা টিচিং পেন্ডেন্ট থেকে গিয়ার রেশিও বা অন্যান্য মোশন প্যারামিটার পরিবর্তন করবেন না।এটি হ্রাস অপারেশন (250mm/s) ফাংশনকে প্রভাবিত করবে।
15. নিরাপদে শিক্ষা উপকরণ ব্যবহার করার সময় বেশ কয়েকটি বিষয়ের প্রতি মনোযোগ দিতে হবে:
টিচিং পেন্ডেন্টে ইনস্টল করা সক্ষম ডিভাইস বোতাম, যখন অর্ধেক চাপ দেওয়া হয়, তখন সিস্টেমটিকে মোটরস অন মোডে পরিবর্তন করে।বোতামটি প্রকাশ করা হলে বা সম্পূর্ণভাবে চাপলে, সিস্টেমটি মোটরস অফ মোডে পরিবর্তিত হয়।
16. নিরাপদে শিক্ষণ উপকরণ ব্যবহার করার জন্য, নিম্নলিখিত নীতিগুলি অনুসরণ করা আবশ্যক:
1. যখন প্রোগ্রামিং বা ডিবাগিংয়ের সময় সক্রিয় ডিভাইস বোতামটি তার কার্যকারিতা হারাতে পারে না এবং রোবটটিকে সরানোর প্রয়োজন হয় না, তখন অবিলম্বে সক্রিয় ডিভাইস বোতামটি ছেড়ে দিন।
2. প্রোগ্রামিং কর্মীরা যখন একটি নিরাপদ এলাকায় প্রবেশ করেন, তখন তাদের অবশ্যই সর্বদা তাদের শরীরে শিক্ষণীয় দুল বহন করতে হবে যাতে অন্যরা রোবটকে নড়াচড়া করতে না পারে।
17. রোবোটিক হাতের কাজের পরিসরের মধ্যে কাজ করার সময়, নিম্নলিখিত বিষয়গুলি অবশ্যই লক্ষ্য করা উচিত:
1. কম্পিউটারের সংযোগ বিচ্ছিন্ন করতে বা দূরবর্তীভাবে পরিচালনা করতে সক্ষম ডিভাইসটি পরিচালনা করার জন্য নিয়ামকের মোড নির্বাচনের সুইচটিকে ম্যানুয়াল অবস্থানে পরিণত করতে হবে;
2. যখন মোড নির্বাচন সুইচ চালু থাকে
3. রোবোটিক বাহুর ঘূর্ণন অক্ষের দিকে মনোযোগ দিন, চুল বা পোশাক মিশে গেলে সতর্ক থাকুন।এছাড়াও, রোবোটিক বাহুতে অন্যান্য নির্বাচিত উপাদান বা সরঞ্জামগুলিতে মনোযোগ দিন;
4. প্রতিটি অক্ষের মোটর ব্রেক পরীক্ষা করুন।
18. স্পর্শ বিচ্যুতি
ঘটনা 1: আঙ্গুল দ্বারা স্পর্শ করা অবস্থানটি মাউস তীরের সাথে মিলে না।
কারণ: ড্রাইভার প্রোগ্রাম ইনস্টল করার পরে, পাঠদানের দুলটি ক্রমাঙ্কনের সময় ষাঁড়ের চোখের অবস্থানের কেন্দ্রে উল্লম্বভাবে স্পর্শ করেনি।
সমাধান: অবস্থান পুনঃক্রমানুসারে।
ঘটনা 2: কিছু এলাকায় সঠিক স্পর্শ আছে, অন্যদের স্পর্শে বিচ্যুতি আছে।
কারণ: সারফেস অ্যাকোস্টিক ওয়েভ টাচ স্ক্রিনের চারপাশে অ্যাকোস্টিক রিফ্লেকশন স্ট্রাইপে প্রচুর পরিমাণে ধুলো বা স্কেল জমা হয়, যা অ্যাকোস্টিক সিগন্যালের সংক্রমণকে প্রভাবিত করে।
সমাধান: টাচ স্ক্রীন পরিষ্কার করুন, টাচ স্ক্রিনের চারপাশে সাউন্ড ওয়েভ রিফ্লেকশন স্ট্রাইপগুলি পরিষ্কার করার জন্য বিশেষ মনোযোগ দিন।পরিষ্কার করার সময়, টাচ স্ক্রিন নিয়ন্ত্রণ কার্ডের পাওয়ার সাপ্লাই সংযোগ বিচ্ছিন্ন করুন।
19. দুল স্পর্শ কোন প্রতিক্রিয়া শেখান
ঘটনা: পর্দা স্পর্শ করার সময়, মাউসের তীরগুলি সরে না এবং অবস্থানের কোনও পরিবর্তন হয় না।
কারণ: এই ঘটনার জন্য অনেক কারণ রয়েছে, নিম্নরূপ:
1. সারফেস অ্যাকোস্টিক ওয়েভ টাচ স্ক্রিনের চারপাশে অ্যাকোস্টিক রিফ্লেকশন স্ট্রাইপে জমে থাকা ধুলো বা স্কেল খুবই গুরুতর, যার ফলে টাচ স্ক্রিন কাজ করতে ব্যর্থ হয়;
2. স্পর্শ পর্দার ত্রুটি;
3. টাচ স্ক্রিন কন্ট্রোল কার্ডটি ত্রুটিপূর্ণ হয়েছে;
4. টাচ স্ক্রিন সিগন্যাল লাইনটি ত্রুটিপূর্ণ হয়েছে;
5. হোস্ট malfunctions এর সিরিয়াল পোর্ট;
6. টিচিং পেন্ডেন্টের অপারেটিং সিস্টেমটি ত্রুটিপূর্ণ হয়েছে;
7. টাচ স্ক্রীন ড্রাইভার ইনস্টলেশন ত্রুটি.
সমাধান: টাচ স্ক্রীন সিগন্যাল ইন্ডিকেটর লাইট পর্যবেক্ষণ করুন, যা স্বাভাবিক পরিস্থিতিতে প্রতি সেকেন্ডে প্রায় একবার জ্বলে।
পর্দা স্পর্শ করার সময়, শিক্ষার দুল কালো হয়ে যায়, যা একটি জটিল সমস্যা।ব্যাকলাইট শক্তি-সঞ্চয় সেট করা হলে, কালো পর্দা স্বাভাবিক;যদি সিস্টেম কন্ট্রোল এরিয়াতে দ্বিতীয় শব্দটি দুর্ঘটনাক্রমে চালিত হয়, তাহলে স্ক্রিনটিও কালো হয়ে যাবে।যদি প্রথম দুটি পয়েন্ট বাদ দেওয়া হয়, পর্যালোচনার জন্য সর্বশেষ ফার্মওয়্যারে আপডেট করুন।
আপনার তদন্ত আমাদের সরাসরি পাঠান

